现今相机传感器使用广泛,为了使相机成像更加真实,就需要了解对应相机模型以及对应参数,进而修复可能出现的成像问题。了解模型后,采用对应模型进行相机标定,然后去畸变等等。
1 针孔相机
1.1 针孔相机模型
对于薄透镜的针孔相机,其成像可简化成如下形式
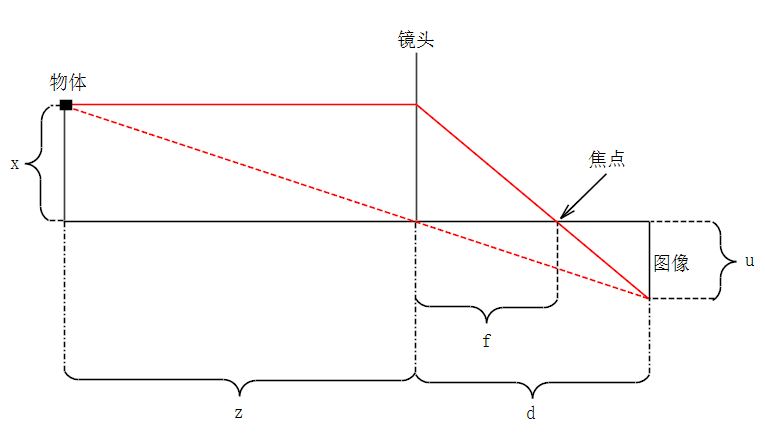
上面模型中,\((x,y,z)\)为相机坐标系下的3D点,其中以相机镜面正前方为\(z\)方向。上面模型中\(f\)为相机焦距,\(d\)为像距。根据相似三角形原理,不难得到如下结果
(1)$$ \begin{cases}
\dfrac{x}{f}=\dfrac{u}{d-f}
\\
\dfrac{x}{z}=\dfrac{u}{d}
\end{cases}
\Rightarrow f=\dfrac{d}{\dfrac{d}{z}+1} \Rightarrow \dfrac{1}{f}=\dfrac{1}{z}+\dfrac{1}{d}
$$
受限于相机尺寸以及为了扩大成像视野,一般\(z >> d\),这时\(f \approx d\)(这就是成像在焦点附近比较清晰的原因),因此可得到像平面的坐标
(2)$$
p_x=f\dfrac{x}{z}
$$
同理可以得到
(3)$$
p_y=f\dfrac{y}{z}
$$
注意,\((p_x, p_y)\)仅是理论上像平面的坐标。由于相机一般由感光器件来进行图像映射,感光器反馈的是像素单元的坐标,假设单个像素横向占用\(1/l_x\)米,纵向占用\(1/l_y\)米,则可以使用\(l_x、l_y\)将\((p_x, p_y)\)缩放到像素坐标。另一方面,由于\((p_x, p_y)\)得到的坐标是以相机光心为原点,而常见的图像坐标以图像左上角为原点,因此需要移动原点,这时在缩放后的像素坐标上加一个偏移\((c_x,c_y)\)。一般\((c_x,c_y)\)取相机光心在像素中的坐标值。最终有如下针孔相机模型
(4)$$ \begin{cases}
u =l_xp_x+ c_x= f l_x \dfrac{x}{z}+c_x
\\
v =l_yp_y + c_y = f l_y \dfrac{y}{z} + c_y
\end{cases}
$$
为了简洁表示,这里设归一化坐标\((x',y')\)如下
(5)$$ \begin{cases}
x'=\dfrac{x}{z}
\\
y'=\dfrac{y}{z}
\end{cases}
$$
以及设置内参
(6)$$ \begin{cases}
f_x =f l_x
\\
f_y = f l_y
\end{cases}
$$
将(5)(6)代入(4)得有针孔相机模型
(7)$$ \begin{cases}
u = f_x x'+c_x
\\
v =f_y y' + c_y
\end{cases}
$$
1.2 图像倾斜修正
现在面阵相机比较普遍,工业上也使用线阵相机,而有些线阵相机也会按线条进行拼接成一个“面阵”,因此最终都需要呈现矩阵像素点阵。如下图a,理想中的相机传感器上的感光器件应该呈方形(或矩形)分布,然而对于一些生产工艺较差的相机,如下图b,其感光器件可能呈现如下右图的平行四边形排布。当出现图b的情形时,这时呈现的图像也跟着倾斜。如果想了解一些成像原理,可以参考文献[1]。
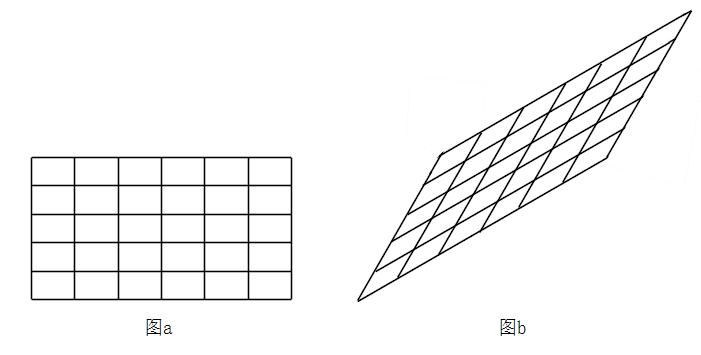
为了解决上图倾斜的问题,不失一般性,以上图b为原型,建立如下图的模型。
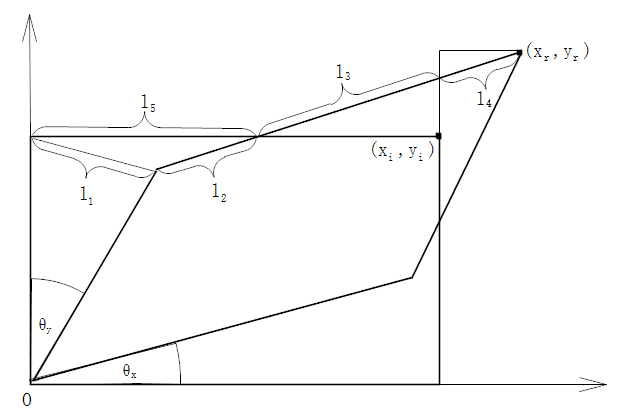
这个模型中约定真实成像点应该在\((x_r,y_r)\),因为感光器原因,反馈了一个错误的位置\((x_i,y_i)\),器件沿着\(x\)轴倾斜的角度为\(\theta_x\),沿着\(y\)轴倾斜角度为\(\theta_y\),这时需要得到模型中的坐标\((x_r,y_r)\)。根据模型中的几何关系,可以得到
(8)$$\begin{aligned}&\begin{cases}
\dfrac{l_1}{\sin\theta_y}=\dfrac{y_i}{\sin(\dfrac{\pi}{2}-\dfrac{\theta_y}{2})}
\\
\dfrac{l_1}{\sin \theta_x}=\dfrac{l_2}{\sin\dfrac{\theta_y}{2}}=\dfrac{l_5}{\sin(\pi-\theta_x-\dfrac{\theta_y}{2})}
\\
l_3=\dfrac{x_i-l_5}{\cos \theta_x}
\\
l_4=x_i-l_2-l_3\\
x_r =x_i+l_4\cos\theta_x
\\
y_r = y_i+(l_3+l_4)\sin\theta_x
\end{cases}\\ &\Downarrow
\\&\begin{cases}
x_r =\cos\theta_xx_i+\sin\theta_yy_i
\\
y_r =\sin\theta_xx_i+\cos\theta_y y_i
\end{cases}\end{aligned}
$$
注意,上面公式中\((x_i,y_i)\)与\((x_r,y_r)\)都不是相对相机光心像素点为原点,进一步这里设置\(S\)矩阵
(9)$$S =\begin{bmatrix}
\cos\theta_x & \sin\theta_y
\\
\sin\theta_x & \cos\theta_y
\end{bmatrix}
$$
将(9)代入(8)有
(10)$$ \begin{aligned}
\begin{bmatrix}
x_r
\\
y_r
\end{bmatrix}
&=S\begin{bmatrix}
x_i
\\
y_i
\end{bmatrix}
\\
&=S\begin{bmatrix}
f_xx'+c_{xi}
\\
f_yy'+c_{yi}
\end{bmatrix}
\\
&=S\begin{bmatrix}
f_xx'
\\
f_yy'
\end{bmatrix}+S\begin{bmatrix}
c_{xi}
\\
c_{yi}
\end{bmatrix}
\\
&=S\begin{bmatrix}
f_xx'
\\
f_yy'
\end{bmatrix}+\begin{bmatrix}
c_x
\\
c_y
\end{bmatrix}
\\
&=\begin{bmatrix}
fl_x\cos\theta_x & fl_y\sin\theta_y
\\
fl_x\sin\theta_x & fl_y\cos\theta_y
\end{bmatrix}\begin{bmatrix}
x'
\\
y'
\end{bmatrix}+\begin{bmatrix}
c_x
\\
c_y
\end{bmatrix}
\end{aligned}
$$
公式(10)中的\((c_x,c_y)\)表示修正后的偏移量。进一步,为了简洁表示,这里设置如下变量
(11)$$\begin{cases}
f_x = fl_x\cos\theta_x
\\
f_y=fl_y\cos\theta_y
\\
\alpha_x =fl_x\sin\theta_x
\\
\alpha_y=fl_y\sin\theta_y
\end{cases}$$
设置如下内参矩阵\(K\)
(12)$$K = \begin{bmatrix}
f_x & \alpha_y & c_x
\\
\alpha_x & f_y & c_y
\\
0 & 0 & 1
\end{bmatrix}$$
则可得倾斜修正后的模型
(13)$$ \begin{bmatrix}
u
\\
v
\\
1
\end{bmatrix}=K \begin{bmatrix}
x'
\\
y'
\\
1
\end{bmatrix}$$
注意,内参矩阵\(K\)里的参数\(f_x、f_y、\alpha_x、\alpha_y\)反映了各自缩放与倾斜的信息,特别地,当\(\alpha_x = 0\)时,内参矩阵\(K\)变为如下形式
(14)$$K = \begin{bmatrix}
fl_x & fl_y\sin\theta_y & c_x
\\
0 & fl_y\cos\theta_y & c_y
\\
0 & 0 & 1
\end{bmatrix} = \begin{bmatrix}
f_x & \alpha_y & c_x
\\
0 & f_y & c_y
\\
0 & 0 & 1
\end{bmatrix}=\begin{bmatrix}
f_x & \alpha f_x & c_x
\\
0 & f_y & c_y
\\
0 & 0 & 1
\end{bmatrix}$$
公式(14)中\(\alpha = \dfrac{l_y}{l_x}\sin\theta_y\),OpenCV中就使用的这种表示形式,由于一般\(l_x\)与\(l_y\)值很接近,因此\(\alpha \approx \sin\theta_y\),这时\(\alpha\)主要反映阵列偏离\(y\)轴的程度,这个值越远离0,则越加倾斜。
PS:
A : 上面导出的修正模型中\(\theta_x、\theta_y\)正负均可,导出的公式一致。
B : 这里的导出方式和一般文献的导出方式正好相反(例如文献[2]),这里基于的原理是给相机一个非矩形正确的光源点位置,但是信号反馈到一个矩形错误的位置,因此对其进行修正,而一般的文献推导是正确的光源点为矩形位置,信号反馈为非矩形位置。
C : 现今的相机,一般\(\theta_x=0、\theta_y=0\),所以很多时候\(K\)少了\(\alpha_x、\alpha_y\)两个内参。
D :常规情况下,认为工艺中仅存在左右倾斜的情况,即\(\theta_x=0\),所以大部分文献导出的内参没有\(\alpha_x\)。
E : 常规情况下,\(l_x \approx l_y\),所以大部分情况下会看到\(f_x\)与\(f_y\)接近。
1.3 针孔相机畸变
1.2修正的是倾斜,倾斜的模型是线性的,而有时成像扭曲,这时就需要对相机进行畸变处理。
由于相机装配或者本身形状原因,相机图像一般存在畸变,畸变呈现的图形往往扭曲。
1.3.1 径向畸变
由透镜形状引起的畸变称为径向畸变,在透镜拍摄过程中,往往一条直线在相机上显示为一条曲线,在越靠近边缘的地方,这种现象越明显。这里径向畸变主要包括桶形失真(图形上表现为外凸)与枕形失真(图形上表现为内凹)。
由于径向畸变是随着与中心之间的距离增加而增加,因此往往使用一个与径向相关的多项式来进行修正:
(15)$$
\begin{cases}
x_d=x'(1+k_1r'^2+k_2r'^4+k_3r'^6+…)
\\
y_d=y'(1+k_1r'^2+k_2r'^4+k_3r'^6+…)
\end{cases}
$$
公式中\(k_1,k_2,k_3,…\)表示修正系数,一般的相机使用\(k_1,k_2\)修正系数就足够了,而对于鱼眼相机可能还需要加入\(k_3\)作为修正项。这里径向半径 \(r'=\sqrt{x'^2+y'^2}\)。
1.3.2 切向畸变
由于相机组装过程中不能使透镜和成像面严格平行,这时会引入切向畸变,对于切向畸变,可使用如下公式修正
(16)
$$
\begin{cases}
x_d=x'+2p_1x'y'+p_2(r'^2+2x'^2)
\\
y_d=y'+p_1(r'^2+2y'^2)+2p_2x'y'
\end{cases}
$$
1.3.3 针孔相机畸变修正模型
结合(15)(16)得到针孔相机畸变的修正模型
(17)
$$
\begin{cases}
x_d=x'(1+k_1r'^2+k_2r'^4+k_3r'^6+…)+2p_1x'y'+p_2(r'^2+2x'^2)
\\
y_d=y'(1+k_1r'^2+k_2r'^4+k_3r^6+…)+p_1(r'^2+2y'^2)+2p_2x'y'
\end{cases}
$$
使用修正后的归一化坐标\((x_d,y_d)\)代入(13)的相机模型有
(18)$$
\begin{bmatrix}
u
\\
v
\\
1
\end{bmatrix}=K \begin{bmatrix}
x_d
\\
y_d
\\
1
\end{bmatrix}
$$
1.4 针孔相机内参标定
所谓内参标定,就是通过某种方式确定出内参矩阵\(K\)以及相应的畸变参数。而这里所谓的某种方式,就是在已知输入输出的情况下,反算出内参,这里涉及到两个层面:非线性求解、给定输入输出。
非线性求解,这个需要使用非线性求解器,这里直接采用某种非线性求解算法即可。
给定输入输出,即现实中给定某个特征,这个特征成像后具有某种性质,而根据这种性质建立约束,进而使用非线性方法迭代求解。例如直线特征,现实生活中一条直线,成像后也应该是一条直线,而不是曲线;现实生活中不是特远的矩形块儿,成像后也应该保持矩形特征。所以常见使用方形格子标定板进行标定。当然,也可以不使用方形格子板,自己手动指定一些特征,也是一样的。
还需要注意的是,如果标定时夹杂了位姿(一个变换),如果能提前确定好位姿值最好,否则优化求解中会多位姿变量的求解。这个主要根据构建约束的方式来确定。
2 其它相机模型
这里提到的相机模型,均需要去畸变,它们主要不同点是去畸变基于的模型不同。去完畸变后,就简化成一个针孔相机,进而成像。
这里同样记物点在相机坐标系下坐标为\((x,y,z)\),归一化坐标为\((x',y')\),下面的模型主要是对\((x',y')\)修正得到\((x_d,y_d)\),最后代入(18)式。因此每个模型中的内参除了模型需要的几个参数外,还包括\(K\).
2.1 UCM模型[3]
UCM模型全称叫Unified Camera Model。这个模型主要用于折反射相机。它是基于一个物点投影到单位球体上,然后再投影到像平面这么一个过程构建模型。这个模型的修正公式如下
(19)$$
\begin{cases}
x_d=\dfrac{x}{\alpha d + (1-\alpha)z}
\\
\\
y_d=\dfrac{y}{\alpha d + (1-\alpha)z}
\end{cases}
$$
公式中\(\dfrac{\alpha}{1-\alpha}\)表示球体中心到像平面距离,而\(d\)则使用如下方式计算
(20)$$d = \sqrt{x^2+y^2+z^2}$$
UCM模型需要的内参为\(K, \alpha\).
2.2 EUCM模型[3]
EUCM模型全称叫Extended Unified Camera Model。UCM的镜头是一个圆形球面,为了更具一般性,EUCM将镜头模型扩展到椭圆形,因此增加了一个控制椭圆程度的参数\(\beta\)(此参数越接近1,镜头椭圆度越小,这时镜头面越接近圆球面;否则镜头的椭圆度越大,镜头面就是椭圆面了).
EUCM模型依然使用(19)式进行修正,但\(d\)则使用如下方式计算
(21)$$d = \sqrt{\beta(x^2+y^2)+z^2}$$
EUCM模型需要的内参为\(K, \alpha, \beta\).
2.3 KB模型[4]
KB模型全称叫KannalaBrandt Camera Model,它是Juho Kannala和Sami S. Brandt根据几种鱼眼模型(等距投影模型、等立体角投影模型、正交投影模型和体视投影模型)分析得出。KB模型是一个通用模型,适合常见的普通镜头、广角镜头、鱼眼镜头。这个模型的修正公式如下
(22)$$
\begin{cases}
x_d=\dfrac{\theta_d}{r}x
\\
\\
y_d=\dfrac{\theta_d}{r}y
\end{cases}
$$
公式中的\(r, \theta_d\)使用如下公式获取
(23)$$\begin{aligned}
r &= \sqrt{x^2+y^2}
\\
\theta &=\arctan(r,z)
\\
\theta_d&=\theta+k_1\theta^3+k_2\theta^5+k_3\theta^7+k_4\theta^9+…
\end{aligned}$$
KB模型需要的内参为\(K, k_1, k_2, k_3, k_4, …\).
2.4 FOV模型[3]
FOV模型全称叫Field Of View Camera Model。FOV(视场相机)模型, 假设像点与主体点之间的距离近似正比于对应的3D点与光轴之间的角度,因此提出如下修正模型
(24)$$
\begin{cases}
x_d=\dfrac{r_d}{r}x
\\
\\
y_d=\dfrac{r_d}{r}y
\end{cases}
$$
公式中\(r_d\)按如下方式计算
(25)$$r_d=\dfrac{\arctan(2r\tan(w/2), z)}{w}$$
公式中的参数\(w\)表示对应于理想鱼眼镜头的视场。
FOV模型需要的内参为\(K, w\).
2.5 DS模型[3]
DS模型全称叫Double Sphere Camera Model,即双球面相机模型。这个模型主体思想是,一个点会被连续投影到两个球体上。这个模型可以看成EUCM的扩展。作者说这个模型更加适合鱼眼相机。这里模型的修正公式如下
(26)$$
\begin{cases}
x_d=\dfrac{x}{\alpha d_2+(1-\alpha)(\xi d_1+z)}
\\
\\
y_d=\dfrac{y}{\alpha d_2+(1-\alpha)(\xi d_1+z)}
\end{cases}
$$
公式中\(d_1、d_2\)按如下方式计算
(27)$$\begin{aligned}d_1 &= \sqrt{x^2+y^2 + z^2}
\\
d_2&=\sqrt{x^2+y^2+(\xi d_1 + z)^2}\end{aligned}$$
公式中\(\xi\)反映了两个单位球体中心的偏移量。
因此DS模型需要的内参为\(K, \alpha, \xi\).
参考
[1] 吴建明. 全面详细解析CMOS和CCD图像传感器
[2] 吕泽乾. 数字图像相关中相机标定技术及其应用拓展[D]. 2020, 中国科学技术大学.
[3] Usenko V , Demmel N , Cremers D . The Double Sphere Camera Model: IEEE, 10.1109/3DV.2018.00069[P]. 2018.
[4] Kannala J , Brandt S S . A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2006, 28(8):1335.